Simulating Cells // ICM W7
Oct 21, 2024

The Assignment
This week's focus is on using computation to explore simulation. With the ability to scale programs and have objects behave independently, consider how simulations can model the world. They can be used to practice procedures, test strategies, visualize systems (natural, biological, or social), and study situations to predict or retell events.
For this assignment, I decided to delve into natural simulations, using the opportunity to finally start reading Daniel Shiffman's The Nature of Code. Inspired by his approach, I focused on using classes and objects to model the behaviors and interactions of independent entities. The project made me question my abilities in math and revisit concepts in physics I hadn’t touched since high school. Shoutout to Dan for making the concepts super accessible, and shoutout to coffee for helping me lock in and digest the info he was putting out.
Inspiration
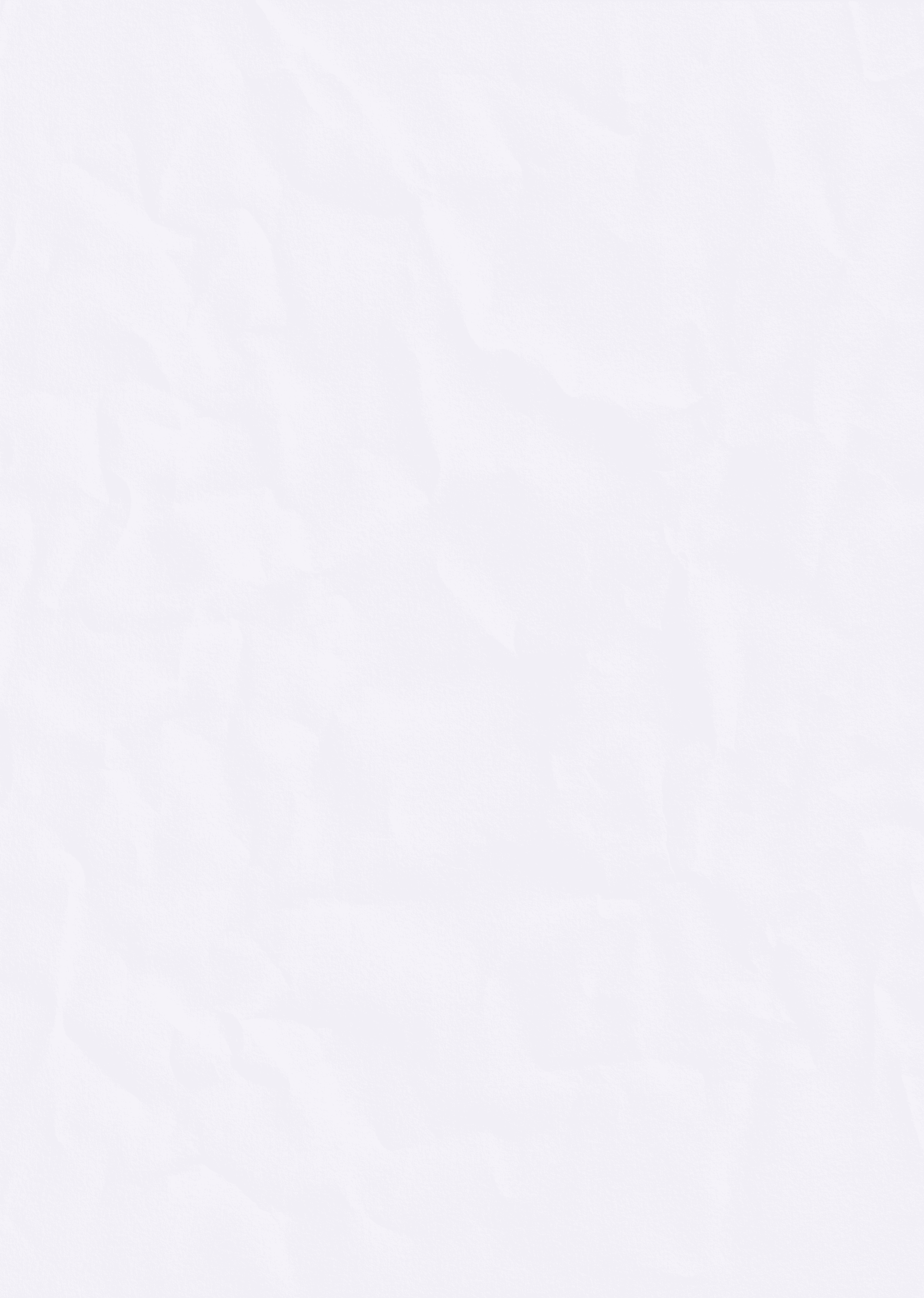
I remember observing cells under a microscope for the first time, I was fascinated by how they behave autonomously, yet each one operates according to a pre-coded set of instructions in its DNA. This DNA essentially governs their behavior, like a biological program. I realized that this kind of behavior could be recreated with code, after all code is just instruction. Inspired by the natural processes I observed, and after reading Dan Shiffman’s The Nature of Code(partially), I saw that simulating such autonomous behaviors is well within the realm of possibility. so I decided to embark on this project—to create a digital version of these cellular processes.
Red Blood Cells Under a Microscope
Now that I had explored some inspiration and looked into the possibility of recreating it in code, I wanted to start considering what behaviors my digital cells could have. I spent time reflecting on the process and thinking about what my cells would look like and what simple cell behavior might look like in this simulation.
Sketching Ideas:
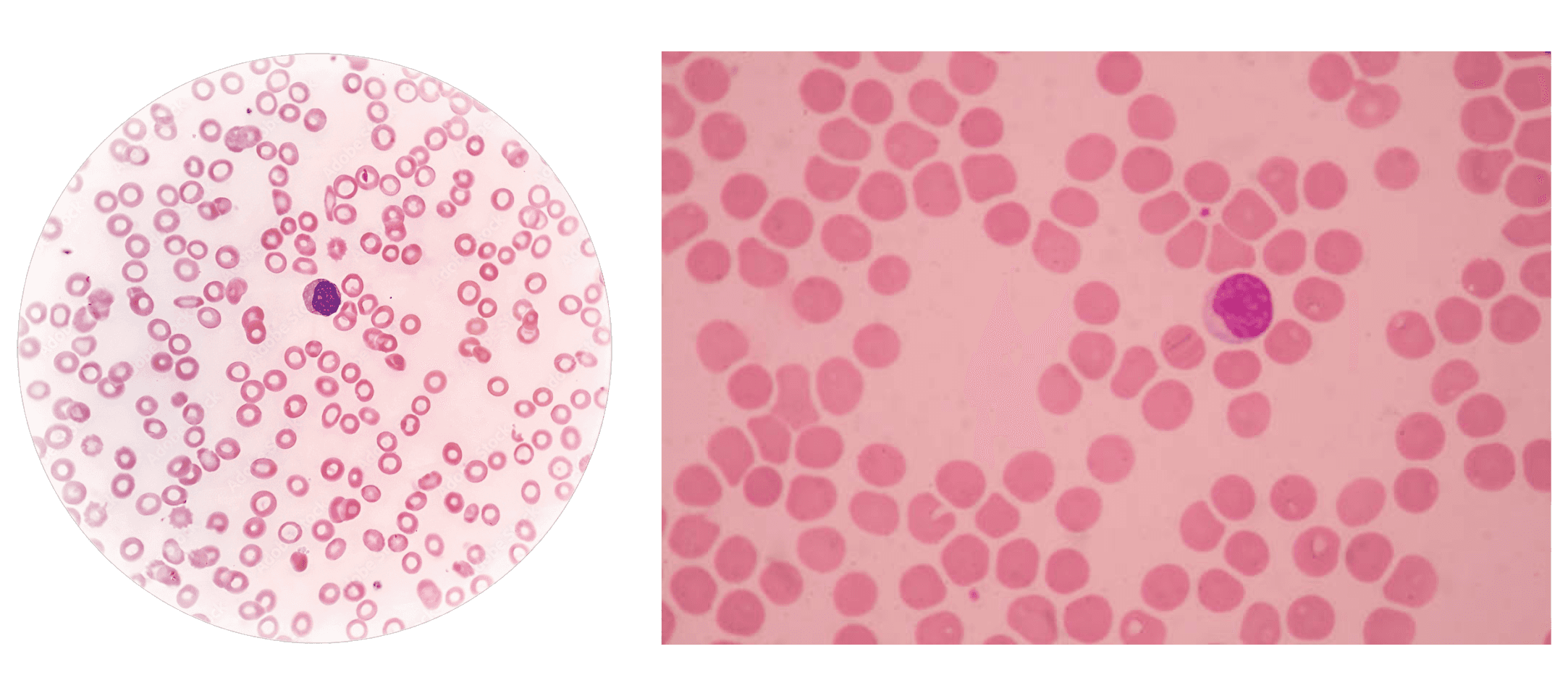
In this phase, I explored different types of cells and sketched them on paper to see which designs resonated with me and were feasible to create. I had to keep in mind both the visual design and the coding aspect—how I would draw the cells and implement their behaviors in p5.
Sketching out cells that I could use for the simulation
While I initially started with more complex ideas, I eventually narrowed it down to one or two simpler cells. Given my understanding of movement in p5, I chose designs that I felt were most achievable within my current skill set.
Final Iteration of cell design
Defining Cell Behavior
In designing the cells for this simulation, I first needed to identify the key behaviors I wanted them to exhibit and clarify my simulation goals. I asked myself: What do I want people to see while viewing this simulation? To achieve this, I focused on a few important aspects of cell behavior and interaction.
The primary behaviors I wanted to capture included basic cell movement, how cells interact with each other and their environment, how they grow or develop, and what the dynamics of feeding and reproduction would look like. I needed to understand how to model cell movement and how they would flock and interact with one another. This led me to explore concepts from Daniel Shiffman's "Nature of Code," particularly the chapters on autonomous agents and particle systems, which provided valuable insights into simulating lifelike behaviors.
Beyond behavior, I also had to think about the visual representation of these interactions. How would different cell stages be portrayed? What would the interaction between cells during reproduction look like? I wanted to create a visual language that was both appealing and informative, allowing users to easily understand the state and actions of each cell at a glance. This involved balancing aesthetic considerations with the need for clear communication of cell states and actions.
Lastly, I had to consider the constraints and limitations within the simulation. What boundaries would the cells operate within? How would I manage population growth and resource scarcity? These questions were crucial in creating a simulation that was not only engaging but also sustainable and performant. I needed to strike a balance between realism and computational efficiency, ensuring that the simulation could run smoothly while still capturing the essence of cellular behavior.
Throughout this conceptual design process, I continually referred back to my main goal: creating an immersive, educational, and visually appealing experience that would allow users to gain insights into the fascinating world of cellular dynamics. This guiding principle helped me make decisions about which features to prioritize and how to implement them effectively.
Iterative Development Process
Based on the conceptual design process, I decided to implement the following key behaviors and features:
Cell Movement:
Random movement for exploration
Directed movement towards food (seeking behavior)
Boundary detection and reflection off the Petri dish walls
Cell Interaction:
Collision detection between cells and food
Interaction between mature (stage 5) cells for reproduction
Cell Growth and Development:
Five distinct stages of cell development
Growth in size as cells consume food
Color changes to represent different stages
Feeding Dynamics:
Food particles randomly spawned in the Petri dish
Cells consume food upon contact
Food consumption triggers growth and stage progression
Reproduction:
Mature (stage 5) cells seek out other mature cells
Reproduction occurs after a period of interaction
New cells are spawned at stage 1
Visual Representation:
Cells represented as organic, blob-like shapes
Color coding for different cell stages
Aura effect for mature (stage 5) cells
Simple circular representation for food particles
Simulation Constraints:
Maximum cell population limit
Bounded environment (Petri dish)
Food scarcity (food spawn rate tied to cell population)
These chosen behaviors and features formed the foundation for the iterative development process that followed.
Iterative Code Development
Basic Setup and Single Cell Movement
In this first stage of development, the goal was to set up the basic structure of the simulation and implement simple cell movement. I started by creating a canvas and a single cell that moves randomly across the screen.
This stage set the foundation for more complex behaviors that I added in later iterations. It demonstrates the use of object-oriented programming to create a simple, moving entity in our simulation.
Final Output:
Multiple Cells and Food
In this stage the code now manage multiple cells and food particles using arrays, introducing the concept of particle systems. I've implemented a simple food spawning mechanism, demonstrating how to add new objects to the simulation over time. The Cell class has been improved with new methods for eating food and seeking targets, introducing more complex motion behaviors. I've added a new Food class to represent food particles in our simulation.
Some key ideas introduced here include: Array manipulation for managing multiple objects, Basic physics simulation with acceleration and velocity, Probability-based object spawning and Simple collision detection for "eating" food.
Pseudo code:
Final Output:
Cell Eating Behavior
In this stage, i'm taking our cell simulation to the next level by implementing a crucial biological process: feeding. I'll introduce a mechanism for cells to consume food, grow, and progress through different life stages. This adds a new layer of complexity to our simulation, bringing us closer to modeling real cellular behavior.
Building on concepts from Daniel Shiffman's "The Nature of Code," particularly Chapters 2 (Forces) and 6 (Autonomous Agents), I'll enhance our cells with the ability to seek out and consume food.
Pseudo code:
Final Output:
Cell Reproduction
In this stage, we'll implement a more sophisticated reproduction mechanism for our cells. This will involve mature cells seeking each other out, interacting, and potentially creating new cells. We'll also ensure that the parent cells revert to their initial stage after reproduction.
Pseudo code:
Final Output:
Final Refinements and Balancing
In this stage, I'll focus on optimizing the simulation and add some final touches to enhance the visual representation and overall performance.
Final Output: Link to Code
Learnings and Reflections
This project help me discover the fundamental relationship between computational thinking and natural systems. Through implementing cell behaviors like movement, feeding, and reproduction, I understood how complex biological processes can be broken down into programmable instructions. Creating digital simulations like this one demonstrated how nature's complexity often emerges from relatively simple rules and interactions – much like how our simulation's sophisticated behaviors emerged from basic physics principles and mathematical models.
The importance of physics and mathematics also became very evident on this project for implementing cell movements and interactions. Concepts like velocity, acceleration, and force vectors – which I hadn't engaged with since high school – proved essential for creating realistic cell behaviors. Working with Daniel Shiffman's "The Nature of Code" reinforced how mathematical models can bridge the gap between natural phenomena and digital simulation. This project is proof that even basic physics principles, when applied systematically through code, can generate surprisingly life like behaviors.
The most intriguing aspect was the exploration of autonomous agents and emergence. By giving each cell its own decision-making capabilities through programmed behaviors, the simulation demonstrated how individual entities following simple rules can create complex, system-level patterns.
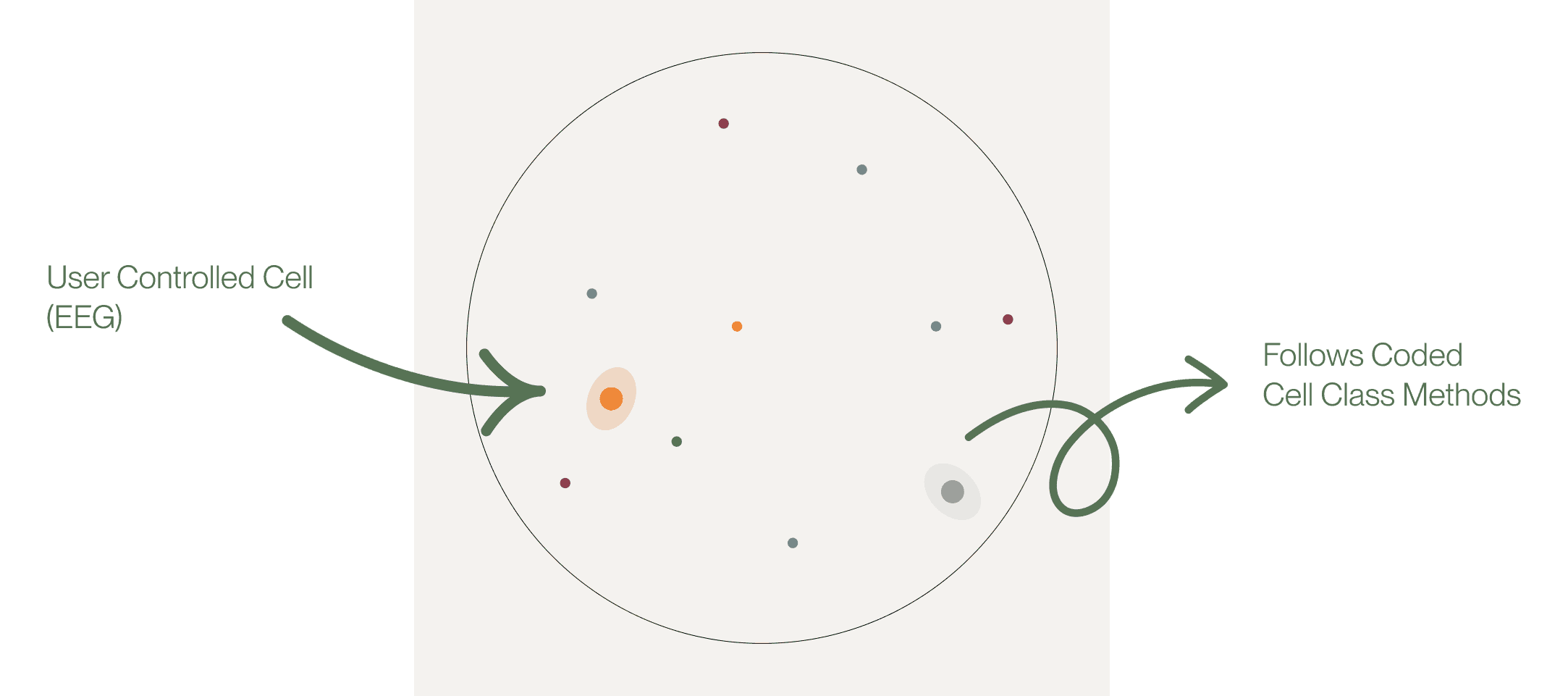
Using EEG waves as input for controlling cell behaviour
Controlling Cell behaviour with our mind
I've been experimenting with the Muse 2 headset and it's been quite exciting to work with the date for interactive simulations. Rather than working directly with raw brainwave data (alpha, beta, delta, theta, and gamma), I've been working on translating these patterns into intuitive mental states that users can consciously control. This abstraction allows us to map states like calmness or focus directly to cell behaviors in our simulation.
The practical implementation can look something like this : in the cell simulation, one cell follows the standard rules while another responds to the user's mental state. When the user focuses, their cell behaves predictably; when their attention wanders, so does their cell. This creates an intimate connection between mental state and digital behavior, opening up possibilities for games where thought becomes a form of input. Future developments could include machine learning models trained on neural data patterns, enabling more sophisticated interactions between thought and simulation.
References
Nik's Blog
Claude by Anthropic
Ellen for being such a great teacher
https://p5js.org/reference
Shiffman, D. (2012). The Nature of Code: Simulating Natural Systems with Processing. Self-published. Retrieved from https://natureofcode.com/
Shiffman, D. (n.d.). The Coding Train. https://thecodingtrain.com/ (For p5.js tutorials and inspiration)
Cursor AI